
レベル4自動運転の実現に向けた取り組みが進んでいます。特に一般道では交差点の通過が大きな課題であることから、道路側のインフラ整備による路車協調システムの構築が検討され、各地で実証実験が進められてきました。来年度からはいよいよ技術基準やガイドラインづくりが始まり、普及のフェーズに入ります。地域の交通事情にあわせ多くの実証実験を展開してきたパシフィックコンサルタンツ 社会イノベーション事業本部 交通政策部 交通戦略室の船岡直樹、デジタルサービス事業本部 DX事業推進部 モビリティDX室の光安皓、中部社会イノベーション事業部 交通政策室の冨永凌太郎、北海道社会イノベーション事業部 交通政策室の中山大地に、路車協調システムの現状と課題について話を聞きました。
INDEX
路車協調システムとは
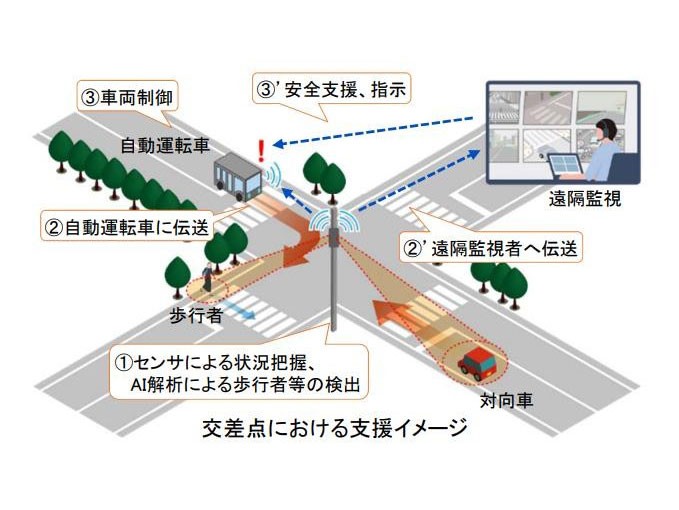
路車協調システムとは、自動運転車に搭載されているセンサ(車載センサ)では検知が難しい道路状況を、道路インフラ側に設置したセンサ(路側センサ)で検知し、自動運転車に情報を提供して安全な運行を支援するシステムのことです。従来の自動運転車は、周辺情報を車載センサで収集し、収集した情報を基に運転をコントロールしてきました。しかし、一般道の交差点等では、建物や対向右折待ちの車両によって車載センサの死角となる箇所や、向かってくる車両の速度が速い道路があり、車載センサだけでは他の接近交通の把握が遅れてしまい、車両側だけでは安全性を担保できないといった課題があります。また、交差点は右折・左折する車両や車道を走る自転車、横断する歩行者などが複雑に絡み合う場所で、交通事故の多発地点となっており、統計上でも交差点は全交通事故の58.2%を占めています(2024年のデータ、日本損害保険協会調べ)。
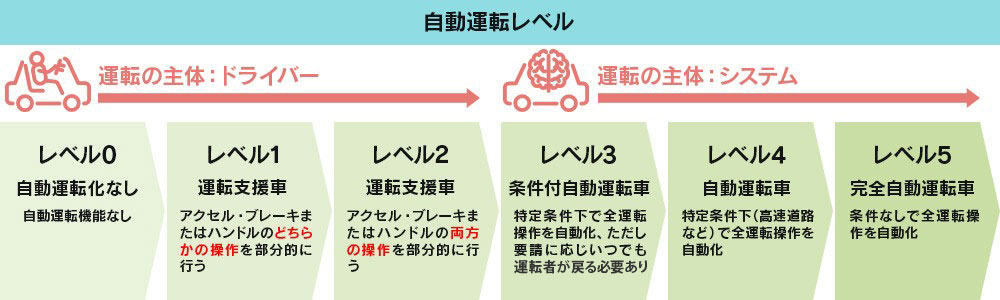
現在の公道での自動運転は、ドライバーが必要に応じて運転に介入するレベル2が基本ですが、レベル4自動運転を実用化し、自動運転を本格的に普及させるためには、複雑な状況が生まれる交差点通過をいかに安全なものにするかが大きなポイントになっています。
路車協調システムの仕組み
路車協調システムは路側センサで障害物検知・処理し、自動運転車に直接あるいは遠隔監視室を介して無線通信にて伝達するシステムです。システムの中心となる路側センサとして使われる機器には、可視光カメラや遠赤外線(FIR)カメラ、LiDAR(ライダー)等があります。LiDARとはレーザ光を照射しそれが対象物に当たって跳ね返ってくる時間を計測することで対象物までの距離や位置を測定する装置です。
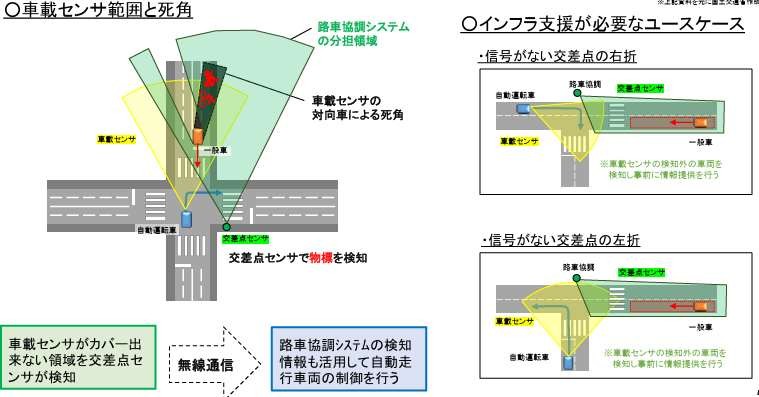
図のように路車協調システムが構築されている交差点を自動運転車が右折しようとするときは、車載センサの死角となっている一般車の後方を交差点センサ(路側センサ)が検知し、何秒後に交差点を通過するかを瞬時に判断して自動運転車に伝送します。自動運転車はその情報と車載センサで得た情報を総合して、どのタイミングで右折するかを判断し実行します。
路車協調システムの課題
実証実験が進む路車協調システムですが、それが有効に機能するかどうかの最大のポイントはセンサの位置と精度、さらに送られた情報を、素早く的確に読み解くプログラムの完成度です。実際にあった例ですが、多雪地帯ではLiDARは降雪を障害物として誤検知してしまうことや、カメラが捉えた四輪車に近接して並走しているバイクを1つの車両と誤って認識してしまい、その後のバイクの動きが予見できない、といったことが起こっています。また、この解決のために並走する4輪車とバイクを別々に認識できるようにアルゴリズムを変更することが、かえって他の映像解析を難しくしてしまうということも起こりました。
路車協調システムの検討で浮かび上がってきているのは、機器としてのセンサの性能だけに注目が集まりがちだということです。その交差点がどういう特徴を持った交差点であり、どういう情報を取得しなければならないのか――交差点には特有の課題があり、それによってセンサがどこを見て何を捉えなければいけないかが決まります。センサの選択は、単に機器としての性能や仕様を選んだり、見える範囲を決めることではありません。その地域ならではの気象への配慮や、大型トラックが多い、二輪車が多い、あるいは自転車や歩行者が多いなど、環境や交通の特長もしっかり把握することで、その交差点の情報を取得するのにふさわしい最適なセンサの種類や組み合わせ、設置場所、チューニングの仕方などが決まります。
路車協調システム実証実験の最新動向
国土交通省はレベル4自動運転の普及を目指して実証実験を2022年度から進めています。すでに自動運転バスなどを運行している自治体が対象で、現行の自動運転をレベル4自動運転に高めるために、特定の交差点を対象に路車協調システムを構築して一定期間運用しさまざまな情報を得るものです。2024年度では全国の22自治体、2025年度は13自治体で行われました。より多く、また多彩なデータが取得できるよう、さまざまな自動運転車両・センサを使い、また想定されるユースケースの多くのデータを取得しています。
パシフィックコンサルタンツも全国で多くの実証実験に関わり、今後の路車協調システム整備のための技術基準やガイドラインの制定に向け、さまざまな技術情報を蓄積しています。例えば2024年には沼津市の千本港町交差点で実証実験を行いました。
<沼津市>
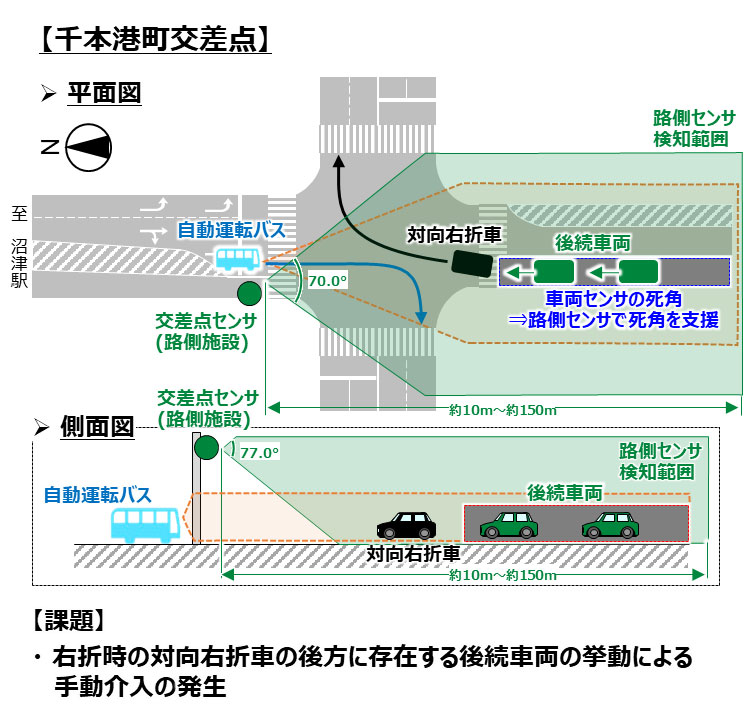
沼津市では、沼津駅と沼津港を結ぶネットワーク強化を目的に、自動運転バスの導入が検討され、2019年度から実証実験が行われました。その路線を対象に2023年度から運行ルート上の右折箇所である千本港町交差点で路車協調システム実証実験を開始し、2024年度は前年度の実績を踏まえ、同交差点で実証を重ねました。千本港町交差点では、バスが右折する際に、対向右折車(大型車)の後方に隠れる後続車両の検知をユースケースとして路車協調システムを構築し、実験を行いました。交差点には路側センサであるLiDAR1台を既存の信号柱に設置するとともに、実験結果を、検知の精度(検知情報の正確性)、鮮度(情報生成・伝送時間のリアルタイム性)、信頼度(伝送情報の安定性)、安全性(路車協調システム導入時の手動介入の発生状況)等の視点で有効性を評価しました。評価の結果、LiDARによる高い検知精度や迅速な処理性能、さらには路車協調システムの導入による安全性の向上といった点で、その有効性が示されました。
<北海道・上士幌町>
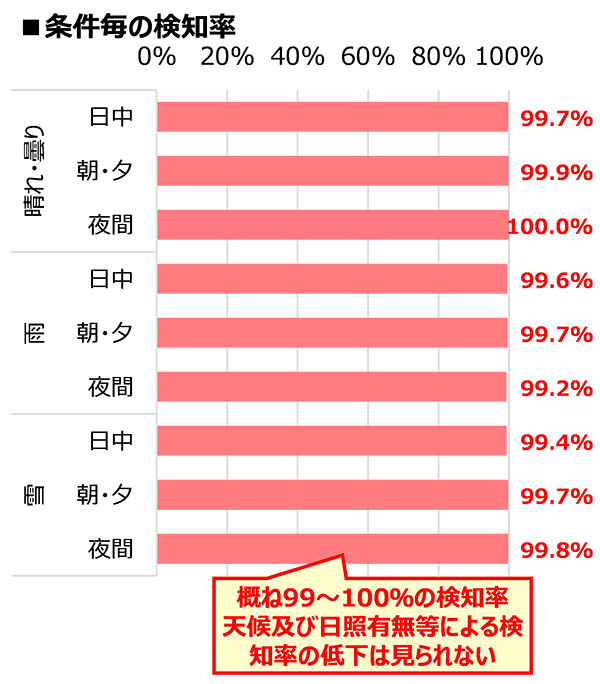
北海道で唯一自動運転バスを定期運行している上士幌町では、2023年度から積雪寒冷地におけるセンサの有効性を検証するための実証実験を行っています。通常、実証実験によるデータ取得期間は1カ月程度ですが、2024年度の上士幌町では6カ月間にわたって行いました。気象や日照条件が大きく変化する季節をまたいでの長期の実証実験は全国初で、例えばセンサの検知精度について、全体を通して検知率がおおむね99~100%と非常に有効なデータを取得できました。一方で、強度の強い降雪時や夜間(特に雨天時)のケースでのデータ取得が今後の寒冷地での実装に向けて必要です。また天候ではありませんが、長期に運用するなかで瞬間的な停電という事態に遭遇することもあり、バックアップや維持管理についての課題も浮かび上がりました。
パシフィックコンサルタンツにできること
レベル4自動運転の実現は、人の運転に起因する交通事故を大幅に削減するものであり、また、高齢者の安全な移動手段の確保、渋滞緩和、ドライバー不足に悩むバスや物流の改善への貢献、さらにはホワイトアウトなどの視程障害時でも安全に帰宅できる交通手段となる可能性もあることから早期の実用化が求められています。
そのためには、運行ルートのなかのどの交差点に路車協調システムを構築するのか、それをどう設計するのかが大きなポイントです。見通しが悪い、交通量が多いなどの地点は、特に自動運転車にとって難易度が高く、また、大型トラックが多い、自転車が多い、といったその地域ならではの難しさが表れているところに焦点を絞り、さらに実装テストを進めていく必要があります。また、センサだけに頼るのではなく、右折専用レーンの確保や路上駐車の排除、自転車の通行区分の確保、見通しを妨げている街路樹の移植や伐採など、走行空間の整備もあわせて必要になります。路車協調システムは、単なるセンサによる情報取得と活用ではなく、道路インフラ全体を総合的に見て、最も効果的にデジタルツールを使う設計とすることが必要であり、そのためには、道路インフラも含めて総合的に整備するという視点が欠かせません。自動運転というと車の性能の話と思われがちです。しかしそれだけでは安全な運行を担保することはできません。路車協調システムや走行空間の整備という道路インフラの総合的な整備が不可欠です。
当社は、社内に公共交通やまちづくりに関わる交通政策部、自動運転等のデジタル事業に関わるDX事業推進部、さらには道路インフラ整備や設計に関わる道路部などを擁しており、全国各地の技術者が、それらの知見を統合して社会課題の解決に挑戦しています。これからもレベル4自動運転の実用化に向け、取り組みを続けていきます。






